Where automation meets the road
Innovation and engineering combine to create safer roadways
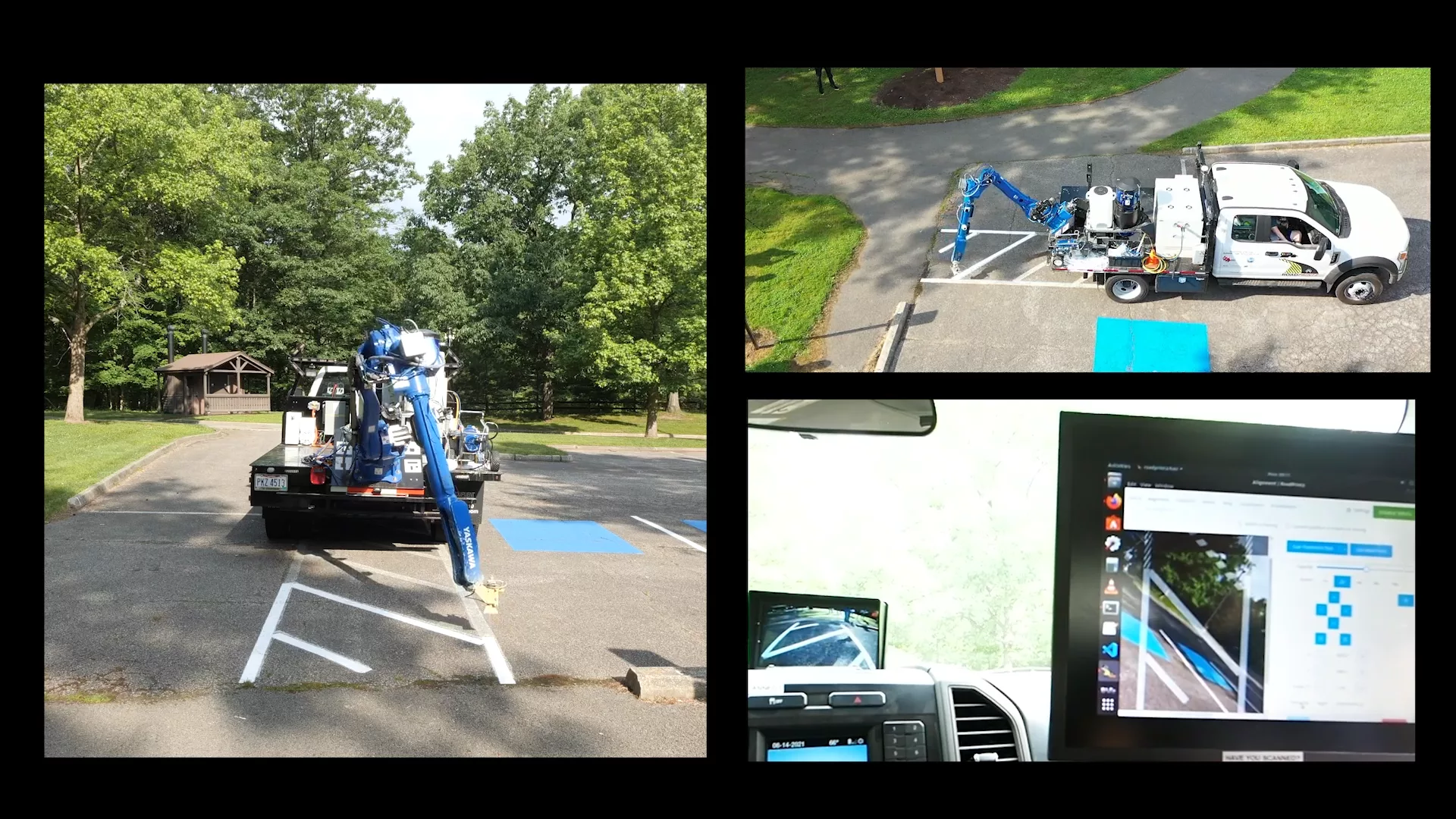
A manufacturer of robotic road painting systems, RoadPrintz Inc., based in Cleveland Heights, Ohio, unites pioneering innovation with sound engineering to produce operator-driven vehicles equipped with cutting-edge technology for the painting of road symbols without the use of stencils. Since the company’s founding in 2018, several partnerships have come to fruition, aiding the small enterprise with its mission to increase the safety of all road users through making effective, visual street markings more affordable and accessible.
A necessary invention
After personally witnessing a $2.1M streetscape project in his local municipality fail to come to completion, retired auto mechanic and shop owner, and now RoadPrintz President, Sam Bell, set out to solve a worldwide problem: the lack of a safe, efficient and affordable method for painting transverse markings (not parallel with the curb) such as turn arrows, bike symbols, diagonal lines and school-zone patterns onto city streets.
With a determination for making things work and solving complex issues in an eco-friendly manner, the mechanic-turned-entrepreneur was inspired to take action upon learning of the cost-prohibitive price ($15,000 per mile) for crews to safely and effectively complete the task of hand-stenciling these markings. The high cost of labor to repaint these symbols annually was also burdensome. To fuel this dedication further, a deadly hit-skip incident involving a road crew from his local municipality occurred in 2019, making the need for a safer method more apparent.
Enlightened with a somewhat unconventional concept, Bell sought the expertise of his friend and Professor of Electrical Engineering and Computer Science at Case Western Reserve University (CWRU), Wyatt Newman PhD, PE. The two soon formed a business partnership, establishing RoadPrintz Inc. and cultivating their budding idea: to “strap” a robot onto the back of a truck.
A trial and evaluation discovery
After an initial planning phase and consultation with their friend and colleague Daniel Pendergast, MBA, MSEE, the Senior Director of Operations at CWRU’s Technology Transfer Office, the co-founders set out to garner more support for their proof-of-concept model. QT Equipment Co. (Akron, Ohio) backed the innovative idea with an initial equity investment and provided a 2018 Ford F-550 truck and custom upfitting services. The president of the largest pavement markings company in Pennsylvania also made a substantial personal investment, and he now serves on the RoadPrintz Inc. Board of Advisors. Other organizations, including the Great Lakes Innovation and Development Enterprise (GLIDE), the Ohio Third Frontier Commission, and Case Western Reserve University’s Technology Transfer Office (TTO), granted financial support, including initial patent expenses. CWRU’s TTO then licensed the technology back to the inventors in accordance with standard university practice.
Because of the capabilities needed to make the application work, it was determined that a robot compatible with Robot Operating System (ROS) was necessary. This free-to-use open source repository – supported by Open Robotics at ros.org – houses a blend of state-of-the-art algorithms, software, drivers, functions and more to provide advanced robotic capability. With Dr. Newman being the author of the world’s first ROS textbook, he was knowledgeable of the fact that all Yaskawa robots provide the ability to use ROS. As a result, a six-axis MH50 II-20 extended-reach robot was acquired from Yaskawa Motoman (Miamisburg, Ohio). This highly repeatable robot provided a wide work envelope with a small interference zone, allowing the robot to work in close proximity to other equipment, as well as reach precise program points for paint dispensing on the road.
As the mobile robotic pavement-marking system took shape through a series of field trials, the RoadPrintz team eventually moved into a pre-production prototype stage largely supported by GLIDE, the State of Ohio’s Technology Validation Startup Fund (TVSF) and Case Technology Ventures (CTV). To get to this point, several notable improvements were made to the truck and overall system.
For the truck: a custom suspension was added, cushioning the robot controller and providing valuable protection from road vibrations caused by potholes and large bumps. Because the robot required 480V 3-phase power, a mobile power supply was also developed. With a little “industrial magic” and a 3-phase rotary converter, a reliable system that could convert 12 volts DC into 480 AC volts came to fruition. Not only was this helpful for running the robot, but also, other peripherals, like a 220 volt air compressor, a 120 volt Graco industrial airless paint sprayer and a heavy-duty camera system for outdoor use, were all easily powered. Most notably, perhaps, was the low noise factor of the power system. The ability to run virtually all the necessary components and systems electrically provided a quiet system, protecting worker ears and minimizing sensory overload for better spatial awareness and a safer work environment.
To simplify the wayfinding and navigation process, as well as provide the survey-level accuracy needed (down to a sub-centimeter) for positioning markings in the center of the lane, a high-precision GPS system and an odometer with the ability to read down to an eighth of an inch were installed. This also facilitated the proper placement of symbols the correct distance from the curb. Likewise, a robust suite of encoders and sensors were mounted on the transmission and drive shaft to further enhance odometry precision. An arm-mounted LiDAR system and digital cameras rounded out the sensor suite required for high-precision geolocation. This sensor fusion provided the ability to bring together inputs from multiple devices and determine the most accurate marking locations.
For the robot: as the RoadPrintz team moved further into the project, it was determined that a robot with a hollow arm would be more beneficial for cabling, including the paint hose, as well as the bead hose needed to dispense reflective glass beads onto the paint for enhanced nighttime visibility. Additionally, the change to a hollow-arm design provided greater programming flexibility for symbol making, alleviating the need to have the robot perform as many wrist flips to compensate for the bead hose.
As a result, the team decided to replace the MH50 II-20 with the Yaskawa GP20HL robot. Like the prior model, the GP20HL came ROS-enabled and featured an extended-arm reach, as well as an IP67-rated wrist and an IP54-rated body for working in potentially harsh environments, like the great outdoors. Furthermore, the robot upgrade allowed using the more compact YRC1000 controller, lightening the load and freeing valuable space aboard the truck. The smaller controller also permitted the team to upgrade to a 2020 Ford F-550 crew-cab truck, which could better accommodate the robot controller, power inverters and other electronic equipment, housing them safely from the outdoor elements.
After an optimization study to determine the best mounting position, the robot was attached with high precision, enabling the end of the robotic arm and paint sprayer to reach under the truck’s rear axle at an extreme angle for the creation of certain road symbols. To perfect the robot’s “hand-eye” coordination, a substantial grant from the National Science Foundation was acquired, aiding in the improvement of certain technological aspects. Most importantly, camera calibration was improved, facilitating timely and accurate robotic vision to perceive features smaller than 1 mm.
As previously mentioned, the use of ROS served to enhance robotic operation, especially for the paint dispensing process. Built using the powerful MotoPlus™ SDK software development kit, Yaskawa’s ROS-I driver technology helped to provide coordinated motion between the end of arm tooling (EOAT) and robot arm, finessing straight edge precision for large-scale words and symbols . Because MotoPlus includes a C/C++ compatible API – that allows developers to create real-time applications that execute natively on the VxWorks operating system of the robot controller – highly deterministic applications for force control, visual servoing and general sensor integration, like this one, can be achieved. Even so, concerns for achieving the precisely coordinated on/off paint spray operations required for sharp symbol edges and boundaries occasionally required digging down below the ROS interface and into the deepest layers of machine coding to minimize latency.
The EOAT entailed a custom 3D printed adapter to attach the spray gun and glass bead equipment to the end of the robot. Facilitating this innovation was CWRU’s Sears think[box] – a world-class makerspace and entrepreneurship ecosystem that offers free resources and guidance for the purpose of prototyping and fabrication.
For the overall system: to provide traffic engineers with the ability to specify and apply paint schemes in minutes (instead of hours), patented technology called Dragon Drop was created. This platform takes road painting to the next level with an advanced Human Machine Interface (HMI) that utilizes a graphical user interface (GUI) tablet that is conveniently mounted in the truck cab. Included with Dragon Drop is a user-friendly library of road symbols and configurations, as well as certain canned options for road painting. With the use of a finger or cursor, a symbol or a grouping of commands can be easily dragged and dropped onto the view screen, providing easy control and command of the mobile robotic pavement-marking system. The system’s advanced technology also accommodates vision-based overpainting of worn or damaged road markings.
A full-circle solution
With the pre-production prototype largely finalized, RoadPrintz has moved on to the product validation stage. Working in conjunction with The Lab @ Cuyahoga County, the RoadPrintz team has recently completed a pilot project with Cleveland Metroparks, bringing full-circle the vision of empowering municipalities, organizations and contractors to safely, effectively and affordably paint transverse road markings.
With over 23,000 acres and 18 million recreational visits per year, Cleveland Metroparks sees the use of this robotic striper as a huge asset. The number of workers needed to paint symbols can be reduced from five down to two, cutting labor costs while moving the remaining three workers to value-added tasks throughout the park system. With the majority of the work doable within the truck’s cab, safety is also increased – workers no longer have to stand in the road to literally watch paint dry. As an added bonus, this method is currently 30 percent faster than the traditional method, and there is no worry about removing a stencil too early, smearing paint and causing expensive rework.
With looming labor shortages, rising costs and more road distractions than ever before, the potential savings this innovative vehicle can provide are quite vast. Reducing the crew costs per mile from $15,000 down to $5,000 is one example. Bell, Newman and the rest of the RoadPrintz team have aspirations to build a fleet of six trucks to lease to selected road painting contractors as beta testers in the near future. Helping to fulfill this vision, is the company’s recent acceptance into the prestigious MassChallenge (MC21) accelerator program, which is a non-profit organization that supports innovation and entrepreneurship through collaboration and development, but that is only the beginning of this “trailblazing” journey for these mobile robotic road painting systems. Learn more at www.roadprintz.com.
Looking for a reprint of this article?
From high-res PDFs to custom plaques, order your copy today!




